
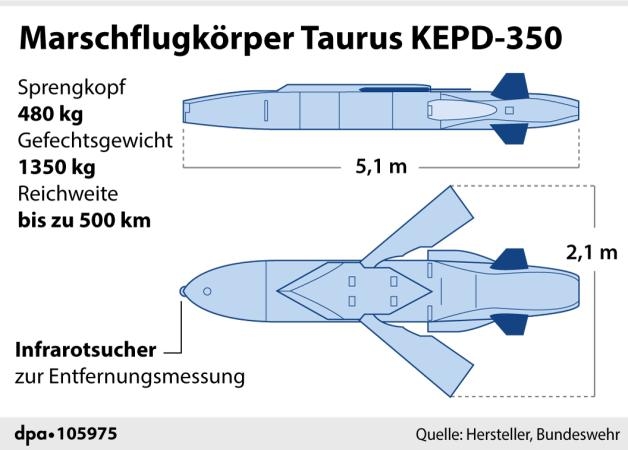
Технічна інформація
Думка автора статті
“Загалом, TAURUS виділяється серед сучасних крилатих ракет гнучким балансом між далекобійністю, малопомітністю й потужністю боєзаряду. Конструктори свідомо відмовились від надзвукової швидкості на користь модульної композитної конструкції, що мінімізує ефективну площу розсіювання й дає змогу летіти на наднизьких висотах поза зоною дії більшості радарів.
А от астосування дволанкової проникаючої БЧ “MEPHISTO” з програмованим підривом перетворює ракету на доволі універсальний засіб ураження — від заглиблених командних пунктів до бетонних бункерів.
Навігаційний комплекс ASGARD* із TRN-корекцією* та IIR-наведенням*, в свою чергу, забезпечує кругове ймовірне відхилення у межах кількох метрів (за деякими джерелами до 5, хоча я, особисто, обережно ставлюся до такої інформації), що підтверджує високу точність системи навіть у середовищі жорсткої протидії заспобів РЕБ.
Водночас висока технологічність (композити, складні шарніри крила, оптичні головки) дуже сильно підвищує вартість обслуговування й вимоги до логістики, а дозвукова швидкість робить ракету вразливішою на завершальній ділянці маршруту.
Попри це,TAURUS демонструє оптимальне співвідношення — дальність 500 + км, БЧ майже півтонни й мала ЕПР (ефективна площа розсіювання) дозволяють успішно подолати сучасні системи ППО та гарантовано уразити захищені цілі.
На мою думку, TAURUS штука хороша, але потрібно подивитися на неї у реальних бойових діях. КР SCALP/ Storm Shadow показали себе добре (підводному човну ЧФ РФ в окупованому Криму та штабам в тих краях передаю “большой привет“), хоча це взагалі не означає, що TAURUS покаже себе так само.”
А тепер переходимо до техніки та інженерії :)
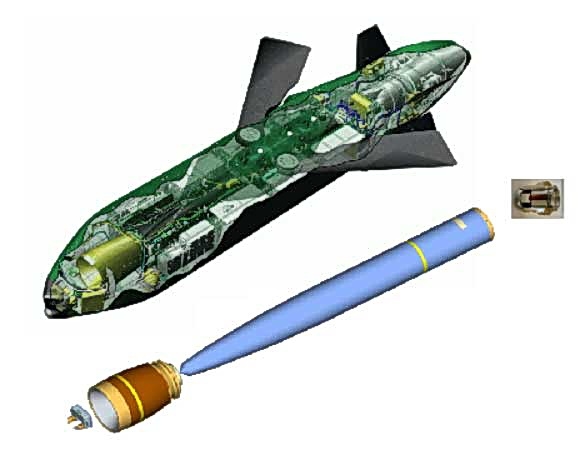
Корпус ракети
Фюзеляж ракети виконано переважно з вуглецевих і скляних композиційних матеріалів, локально підсилених алюмінієвими сплавами в зонах приєднання агрегатів. Така схема забезпечує високу жорсткість при суттєвому зменшенні маси, а також підвищує корозійну й вібраційну стійкість порівняно з традиційним суцільнометалевим монококом. Геометрія планеру оптимізована під вимоги малопомітності: Y-подібне хвостове оперення, плавні сопряження бортів і S-подібні повітрозабірники знижують ефективну площу розсіювання радіолокаційних хвиль. Крім того, силовий каркас поділено на три функціональні модулі—носовий (сенсорний), центральний (паливний бак і системи керування) та хвостовий (газотурбінний двигун і приводи). Модульність конструкції ракети спрощує інтеграцію нових бойових частин або модернізованих прицільно-навігаційних блоків без суттєвого перекомпонування всієї ракети.
Крило розкладне, діаграмне, шарнірно складене вздовж борту й розгортається одразу після відокремлення від носія завдяки піротехнічному механізму. Це рішення дає змогу зменшити габарити виробу під фюзеляжем літака-носія та водночас забезпечує достатню підйомну силу на крейсерському дозвуковому режимі на малих висотах. Конструктивно складний шарнірний вузол і система розгортання крила збільшують виробничу вартість та ускладнюють технічне обслуговування, однак переваги у вигляді компактності та підвищеної аеродинамічної ефективності переважують зазначені недоліки. А що ми маємо від таких конструкторських рішень? А те, що вони разом формують легкий, жорсткий та малопомітний корпус, оптимізований для довготривалого низьковисотного польоту й здатний адаптуватися до майбутніх модернізаційних програм.
Двигун

Турбореактивний двигун Williams F107-WR-105 (експортний індекс PJN-300E), яким оснащують крилату ракету TAURUS KEPD 350 (а також BGM-109 “Tomahawk”. Серія та ж Williams F107-WR, але не 105-й, а 402-й (Williams F107-WR-402)), має одновальну двоконтурну схему й розроблявся спеціально для далекобійних озброєнь «одноразового» циклу. Його компактний осьово-радіальний компресор (один ступінь осьовий і один радіальний) у поєднанні з відносно великим вентилятором формує ступінь обвідного потоку близько 3,5, що забезпечує низький питомий витрат пального на крейсерському режимі дозвукового польоту. Діаметр усього 330 мм, а суха маса приблизно 140 кг дозволяють інтегрувати силову установку в центральний модуль ракети без збільшення радіолокаційної та теплової сигнатури.
Кільцева камера згоряння виготовлена з інконелю, її стінки покрито дифузним шаром і тонким керамічним бар’єром, розрахованими на температури газів до ≈980 °C. Такого захисту цілком достатньо для ресурсу близько 500 годин – для стратегічної крилатої ракети це означає десятки років зберігання і один повноцінний бойовий політ без регламентних оглядів. Паливом слугує стандартний Jet A-1.
Фішка цієї ракети ще полягає у наявності «розумнї» цифрової системи керування двигуном — FADEC* (Full Authority Digital Engine Control). Ця система має два режими керування. Перший режим - це “Loiter-idle”, який застосовується, коли ракета на маршовій ділянці маршруту летить дуже низько над рельєфом, виконуючи огинальний профіль. Під час роботи у цьому режимі, обороти двигуна й подача пального мінімальні, що економить паливо й знижує теплову помітність. Другий режим - номінальний, який застосовується на кінцевій ділянці польоту ракети (захід на ціль). Система FADEC без участі оператора повертає двигун до номінальної тяги ~5 кН, підвищуючи подачу пального та оберти компресора.

Пуск здійснюється автономно: піропатрон розкручує пневмостартер, далі FADEC бере на себе керування розкруткою та запалюванням. Уся задня секція планера – це модуль двигуна: кронштейни кріплення, інтегровані канали відводу тепла й S-подібний впуск формують низьку ефективну площу розсіювання та екранують лопатки компресора від прямої радіолокаційної видимості. У штатному профілі місії TAURUS летить із середньою швидкістю 0,8–0,9 Маха на висоті 30–50 м, витрачаючи близько 0,74 кг пального на кілоньютон-годину тяги; це дає радіус дії понад 500 км, навіть із масивною 480-кг проникаючою бойовою частиною.
Блок наведення та навігації
Навігаційно-цільовий блок (Navigation & Control Block, далі NCB) крилатої ракети TAURUS — це «мозок» виробу, що поєднує одразу три ключові функції: високоточне автономне навігаційне відпрацювання маршруту, обробку розвідувальної сцени цілі та формування команд для автопілота й бойової частини.

У конструктивному сенсі NCB - це жорсткий герметичний модуль довжиною близько 600 мм і масою ~34 кг, розташований у передній третині фюзеляжу за радіопрозорим носовим обтічником. У корпусі з алюмінієвого литва та вуглепластикових панелей демпферами закріплено «три-в-одному» сенсорний пакет:
INS на волоконно-оптичних гіроскопах — задає базову інерціальну платформу з дрейфом < 1 км/год.
Двочастотний приймач GPS/Галілео (SAASM-ready*) — забезпечує корекцію ІНС, поки сигнал навігаційних супутників доступний.
Радар промерювання рельєфу TRN ATR* + ІЧ-система IIR DSMAC* — у фазі маршової траєкторії порівнює “картинку” місцевості з еталонною БД, формуючи уточнення координат із точністю до 3–5 м ігноруючи РЕБ. Ця система є стійкою до спуфінгу.
Програмно-апаратний стек NCB працює під захищеним «м’яким» RTOS* типу PikeOS*: 32-розрядний процесор PowerPC веде навігаційні обчислення, а дублюючий DSP обробляє радиолокаційні та ІЧ-зображення в режимі реального часу. Уся сенсорна інформація інтегрується фільтром Калмана, після чого бортова логіка передає вектор положення і кути Ейлера на автопілот (FADEC/DFCS*) із частотою 100 Гц.
NCB також виконує mission-management: у пам’яті SSD (≈ 2 ГБ) зберігаються до 8(!) альтернативних маршрутів з огинанням ППО; в польоті модуль автоматично перемикається між ними за даними RWR/ESM* або за командами зв’язку one-way datalink*, підвищуючи живучість. До складу блока входить вбудоване джерело безперебійного живлення на літій-іонних акумуляторах (≈ 300 Вт·год), що дозволяє зберігати працездатність навіть при повній втраті бортової мережі.

З точки зору обслуговування NCB є «чорною» коробкою LRU-рівня*: перед вильотом оператор через наземний планувальник завантажує місію та карти висот DTED-2; внутрішній модуль сам діагностує стан IMU*, антен GPS і радару, а після місії віддає лог-файл траєкторії. Такий підхід різко скорочує передпольотну підготовку і забезпечує адаптивність ракети до нових театрів без глибоких доопрацювань ПЗ чи апаратури.
Бойова частина (БЧ)
Бойова частина MEPHISTO (Multi-Effect Penetrator, Highly Sophisticated and Target Optimised) — спроєктована спеціально для виведення з ладу глибоко захищених, заглиблених або багатошарових цілей, не завдаючи при цьому надлишкових побічних руйнувань. На відміну від класичних фугасних або «бетонобійних» зарядів, MEPHISTO об’єднує кілька послідовних ефектів у єдиному модулі масою ~ 481 кг і довжиною 242 см.
У конструкції використано концепцію послідовного подвійного підриву. У носовій частині розміщено малий попередній заряд (~ 20 кг вибухової речовини типу PBXN-109), що спрацьовує одразу після проходження корпусом першої перешкоди: він «розчищає» вузький канал у ґрунті, кам’яній або бетонній оболонці, знижуючи опір та мікротріщини для основного проникника. Головний заряд (~ 400 кг PBXW-11) розташований у товстостінному сталевому корпусі з інварною вставкою; його підрив ініціюється із затримкою, яку програмує електронний «розумний» підривач PIMPF (Programmable Intelligent Multi-Purpose Fuze). Фуз здатен в режимі реального часу «рахувати» кількість пройдених шарів (void-sensing) і, за необхідності, задіяти багатоетапну шкалу уповільнень від 0,1 до ~ 10 мс — саме стільки потрібно, аби корпус пройшов крізь до шести метрів залізобетону чи понад 40 м ґрунту і вибухнув вже всередині сховища, командного пункту чи шахти.

Додаткової ефективності надає «порожнинна» технологія (void-charge design*): за попереднім зарядом у корпусі залишено порожнину, що слугує акумулятором газової енергії; при підриві головного заряду вона фокусує детонаційну хвилю вперед, підвищуючи проникну здатність кумулятивно-фугасного струменя. За даними розробника, MEPHISTO може руйнувати укриття, еквівалентні американському стандарту Hardened Target Shelter*, та унеможливлює відновлення стартових позицій БРСД, енергетичних центрів чи підземних цехів.
Модульність БЧ дозволяє попередньо задавати режими дії: (1) глибоке проникнення зі сповільненням; (2) удар у борт — квазікумулятивний вибух після короткої затримки; (3) поверхневий фугас-фрагментаційний підрив для легких цілей. Переналаштування здійснюється через наземну станцію зчитування місії й не потребує фізичного втручання у корпус.
Відносно безпекових характеристик: увесь вибуховий склад є Insensitive Munition (IM-клас)*, стабільний до ударів і пожеж; крім механічних сейф-пінів, застосовано двоканальні електронні бар’єри, що розмикають ланцюг детонатора до моменту зльоту. За рахунок такої архітектури MEPHISTO поєднує високу глибину пробиття, керовану надійну детонацію й мінімізацію випадкових підривів на борту літака-носія, роблячи TAURUS одним із найефективніших засобів знищення стратегічно важливих укріплених цілей у сучасному арсеналі НАТО.
Програмне забезпечення
Програмне забезпечення (NCB Software Suite) TAURUS фактично становить другий — «невидимий» — рівень конструкції після металу й композитів. Його розробку вели за авіаційним стандартом DO-178C рівня A*, що забезпечує безумовну відмовостійкість під час багатогодинного польоту на надмалих висотах.

Ядром служить мікроядерна RTOS типу PikeOS-ARINC653: усі критичні задачі (сенсорна інтеграція, керування автопілотом, логіка підривника PIMPF) ізольовані у власних «partition» із жорстким розподілом процесорного часу. Це дозволяє оновлювати, скажімо, навігаційні фільтри, не торкаючись модулів безпеки чи самопрограмованої детонації. Головний кодувальний стек написано переважно на Ada 2005* (керування місією та FDIR-алгоритми*) і ANSI-C* (низькорівневі драйвери, DSP-обробка* сигналів), причому блоки INS/GPS/TRN моделювалися у MATLAB/Simulink, а потім автогенерувалися в C з подальшою сертифікацією.
У польоті програмні процеси йдуть за жорсткою часовою сіткою 10 мс. Кожен цикл RTOS послідовно виконує:
Sensor Fusion Loop* (-1 мс): збирання свіжих даних IMU, баро-альтиметра, радарного профілю та IIR-камери.
Kalman Update* (-1,5 мс): інтеграція інформації, детекція викидів, FDIR-тест дрейфу.
Mission Manager* (-1 мс): звірка з еталонними маршрутами DTED/DSMAC*, перевірка тригерів RWR/ESM і визначення, чи слід переключити траєкторію, змінити висоту чи активувати counter-measure.
Guidance & Control* (-2 мс): розв’язання рівнянь Ейлера, формування команд рулів / FADEC і, за потреби, перепрограмування затримки підривача.
Health Log & Datalink (-0,5 мс): протоколювання параметрів і, якщо активовано односторонній канал, приймання нового блок-маршруту.
З точки зору кібербезпеки, усі оновлення ПЗ «проштовхуються» лише на землі через шифрований образ (AES-256* + електронний підпис ECC*) і можуть бути інсталювані за 15 хв без розбирання ракети: флеш-контейнер у NCB зчитує SDI-кабель, перевіряє цифрову сигнатуру та атомарно замінює розділ RTOS.
Наземне середовище планування (Mission Support System, MSS-T*) працює на Windows/Linux і використовує ті самі бібліотеки навігаційної математики, що й летюча версія — таким чином уникається «розбіжності моделей» (model gap). Інженер-оператор завантажує до 8 маршрутів, задає правила пріоритету (наприклад, «уникати ЗРС типу Patriot PAC-3», «зберегти висоту > 50 м над водою») та параметри БЧ. Далі MSS-T компілює бортовий файл .tms та відправляє його у NCB через інтерфейс MIL-STD-1760* або AFDX-Ethernet*.
Пояснення термінології
FADEC – повністю цифрова «автопілот-дросель» двигуна, яка сама дозує пальне і тримає потрібну тягу без участі пілота.
SAASM-ready – GPS-приймач підготовлений до роботи з військовим антиспуфінговим шифрованим сигналом.
TRN ATR – радіолокаційна система, що порівнює рельєф під ракетою з картою (Terrain Referenced Navigation) і впізнає характерні ділянки (Automatic Target Recognition).
ІЧ-система IIR DSMAC – інфрачервоний «телевізор» високої чіткості, який у кінці польоту порівнює теплове зображення цілі зі збереженим шаблоном (Digital Scene-Matching Area Correlation).
RTOS – операційна система реального часу, де задачі виконуються за жорстким графіком без затримок.
PikeOS – конкретна сертифікована RTOS з жорсткою ізоляцією програмних модулів у військовій авіоніці.
DFCS – цифрова система керування польотом, що перетворює команди навігації на сигнали рулів і закрилків ракети.
RWR/ESM – приймачі, які слухають ефір, виявляють роботу ворожих радарів і оцінюють їхнє положення.
One-way datalink – односторонній канал, через який земля може передати ракеті нові команди, але сама ракета мовчить.
LRU-рівень – модульний блок «зняв-замінив» (Line-Replaceable Unit), який обслуговується цілим вузлом без ремонту всередині.
DTED-2 – електронна карта висот Землі з кроком сітки ~30 × 30 м, придатна для низьковисотної навігації.
IMU – інерціальний блок із гіроскопами й акселерометрами, який без GPS обчислює, куди й як швидко рухається ракета.
Void-charge design – бойова частина з порожниною за лідер-зарядом, що фокусує вибухову хвилю і підсилює пробивну дію.
Hardened Target Shelter – бункер або ангар, зведений зі щонайменше метрового залізобетону й розрахований витримати авіабомби.
Insensitive Munition (IM-клас) – вибухівка, яка не детонує від випадкового удару, осколків чи пожежі, підвищуючи безпеку зберігання.
DO-178C рівень A – найжорсткіший авіацстандарт до ПЗ, де помилка може коштувати літака, тому кожен рядок коду формально доводиться.
Partition – ізольована «комірка» в RTOS, якій виділено свою пам’ять і час процесора, тож збій у сусідньому модулі не поширюється.
Ada 2005 – мова програмування з вбудованими перевірками безпеки, популярна для критичних авіакосмічних систем.
FDIR-алгоритми – логіка «пошуку, діагностики й відновлення» відмов, яка автоматично виявляє несправності й переходить на резерв.
ANSI-C – базовий стандарт мови C для системного коду, драйверів і швидких чисельних обчислень.
DTED/DSMAC – цифрова карта рельєфу (DTED) і метод кореляції сцен (DSMAC), що разом дають ракеті точне самоорієнтування над землею.
Guidance & Control – підсистема, яка обчислює, куди треба летіти, і відхиляє руля чи регулює тягу, щоб туди потрапити.
Sensor Fusion Loop – крок програми, де всі датчики зводяться разом, аби отримати найточніше уявлення про положення ракети.
Kalman Update – статистичний фільтр, що приглушує шуми вимірювань і уточнює оцінку координат та швидкостей.
Mission Manager – логіка, яка стежить за маршрутом, загрозами й вирішує, коли змінити висоту, курс чи режим бойової частини.
Health Log & Datalink – модуль, який записує «чорний ящик» бортових параметрів і приймає односторонні коригування від наземного пункту.
MSS-T — програмна система для підготовки маршруту та завантаження місії в ракету TAURUS перед запуском.
MIL-STD-1760 — військовий стандарт підключення ракети до літака, який забезпечує електроживлення, обмін даними та контроль пуску.
AFDX-Ethernet — авіаційний Ethernet-протокол, який забезпечує швидкий і надійний обмін даними між системами ракети або між ракетою та носієм.
