Детальний опис ракети
У цій та в подальших частинах ми розберемо ракету Р-3С майже до останньої гайки.
Перший відсік. Інфрачервона головка самонаведення (ІЧ ГСН) “451-К“
Теплова головка самонаведення є пасивною, що реагує на теплове випромінювання цілі. Вона виконує такі функції:
Здійснює захоплення і супровід цілі в будь-який час доби поза межами хмарності і під кутом не менше 20° до Сонця;
Формує керівний сигнал для наведення ракети на ціль;
Видає цей сигнал на виконавчі механізми системи управління.
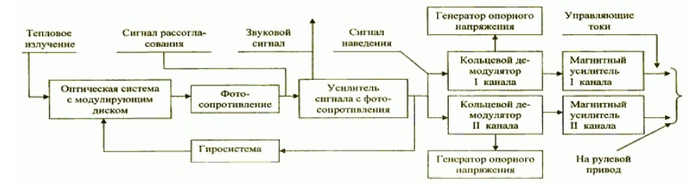
Теплове випромінювання цілі фокусується оптичною системою головки в пляму (теплове зображення цілі) малого діаметра. У фокальній площині оптичної системи встановлено модулювальний диск. Оптична система і модулювальний диск встановлені на роторі гіроскопа й обертаються разом із ним. Поки оптична вісь головки не збігається з лінією візування цілі, модулювальний диск діє як переривник, перетворюючи безперервне теплове випромінювання цілі на "пачки" імпульсів, що слідують один за одним із частотою обертання модулювального диска. Відхилення теплової плями від центру модуляційного диска залежить від кута між віссю головки і лінією візування (кута неузгодженості). Диск влаштований так, що амплітуда імпульсів теплової енергії, які проходять крізь нього, пропорційна цьому відхиленню.
Друга координата відносного положення цілі (кут фазування) визначає кутове положення теплової плями на площині, в якій обертається модулювальний диск, а, отже, і фазу модульованого теплового випромінювання цілі.
Промодульований за амплітудою і фазою потік теплової енергії надходить на фотоопір, встановлений за модулювальним диском. Фотоопір перетворює цей потік на електричний сигнал, що називається сигналом неузгодженості. З фотоопору сигнал неузгодженості надходить на вхід підсилювача, а потім на обмотки корекційних котушок гіроскопа ТГСН. Змінний струм, протікаючи цими обмотками, створює момент, під впливом якого ґіроскоп, а разом із ним оптична система з модулювальним диском рухається в напрямку зменшення відхилення оптичної осі ТГСН від лінії візування цілі. Таким чином, виходить замкнутий контур автоматичного кутового супроводу цілі. Сигнал неузгодженості в цьому контурі відіграє роль негативного зворотнього зв'язку. Той самий сигнал неузгодженості використовується і для управління польотом ракети. Для цього послідовно з обмотками корекційної котушки ввімкнено опори, падіння напруги на яких від струму корекції слугує вхідним сигналом для координатного перетворювача. За допомогою останнього змінну напругу випрямляють і розкладають на дві складові у двох взаємно перпендикулярних площинах, конструктивно суміщених із площинами рулів 1-го і 2-го каналів керування ракети.
Далі два магнітні підсилювачі перетворять сигнали координатного перетворювача в керівні струми, що впливають на приводи рулів ракети. Ракета під впливом аеродинамічного моменту, що виникає під час переміщення рулів, розгортається в потрібному напрямку, орієнтуючись на ціль.
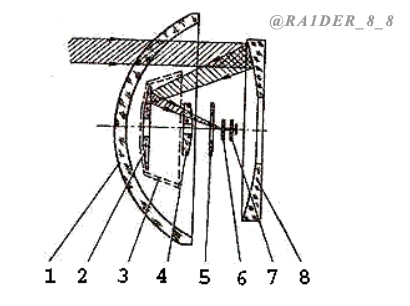
Оптична система головки є дзеркально-лінзовою і призначена для вловлювання і фокусування теплового випромінювання цілі в площині модуляційного диска. Обтічник (1) жорстко пов'язаний з корпусом головки і також є частиною порожнистої сфери. Решта елементів оптичної системи (за винятком фотоопору) жорстко пов'язані з ротором гіроскопа й обертаються разом з ним. Фотоопір (7) закріплений у внутрішньому кільці гіроскопа та відхиляється разом із кільцем на кути стеження головки для того, щоб поверхня фотоопору залишалася перпендикулярною оптичній осі. Сферичне дзеркало (8) виготовлено з оптичного скла і має зовнішнє алюмініювання. Лінза-тримач (4), будучи елементом оптичної системи, одночасно слугує для кріплення плоского дзеркала (2) і бленди (3) на роторі гіроскопа. Бленда (3) закриває лінзу (4) від потрапляння на неї прямих променів (крім променів, що йдуть від дзеркала (2)), оберігаючи фотоопір від прямого засвічення. Діафрагма (5) зменшує відблиски і покращує якість зображення в площині модулювального диска. Модулювальний диск призначений для модуляції теплового випромінювання цілі, що приходить на фотоопір. Завдяки модулювальному диску сигнал неузгодженості, що виробляється головкою самонаведення, несе в собі інформацію про кутові координати цілі: кут неузгодженості та кут фазування.
Як приймач теплового випромінювання цілі, що перетворює це випромінювання в електричні сигнали, в голівці використовується сірчисто-свинцевий фотоопір. Він має максимальну чутливість до теплового потоку з довжиною хвилі 2.4-2.5 мкм. Перед фотоопором розташований германієвий оптичний фільтр, що затримує всі промені з довжиною хвилі до 1.8 мкм, зокрема й промені видимої частини спектра. Під дією променистої енергії відбувається зміна електропровідності фотоопору. Падіння напруги на змінному опорі посилюється електронним підсилювачем, що складається з декількох каскадів. До підсилювача входять також два фільтри. Один із них налаштований на несучу частоту fн=800Гц, другий - на частоту обвідної - 66Гц. Кожен фільтр пропускає електричні сигнали тільки тієї частоти, на яку він налаштований. Це дає змогу виділити слабкий сигнал неузгодженості на загальному тлі перешкод. Навантаженнями підсилювача є корекційні котушки гіросистеми і координатний перетворювач. Котушки змушують гіроскоп прецесувати в напрямку цілі. Напруга, що знімається з електронного підсилювача, містить інформацію про відносне положення цілі в сферичній системі координат, пов'язаній із ракетою. Параметрами сигналу, що визначають координати цілі, є його амплітуда і фаза. Оскільки ракетою керує система рулів, розташованих у двох взаємно перпендикулярних площинах, керувальний сигнал із полярної системи координат потрібно перетворити на прямокутну, жорстко пов'язану з площинами рулів. Функцію розкладання керуючого сигналу на складові виконує координатний перетворювач. Перетворювач являє собою електронний синусно-косинусний блок, що складається з двох однакових частин, які обслуговують 1-й і 2-й канали керування. Робота координатного перетворювача заснована на порівнянні фази сигналу неузгодженості з фазами двох опорних напруг. Опорні напруги виробляються спеціальними генераторами (ГОН), що входять до складу гіросистеми. Керувальні сигнали з координатного перетворювача надходять на два однакові магнітні підсилювачі. Їхнє призначення полягає в посиленні керівних сигналів за потужністю до рівня достатнього для роботи рульових приводів.
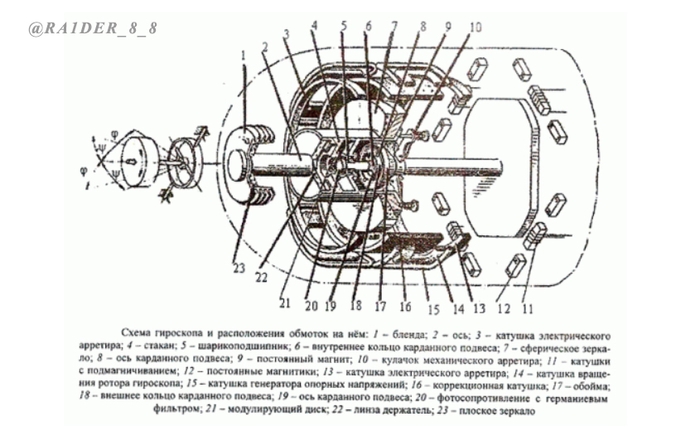
Гіросистема головки самонаведення являє собою триступеневий гіроскоп із корекцією. Він входить складовою частиною в канал супроводу цілі. Ротором гіроскопа слугує постійний магніт (9) еліптичної форми, що рухається у змінному магнітному полі, укріплений у карданному підвісі. Внутрішнє кільце (6) карданного підвісу є внутрішньою рамкою гіроскопа, а зовнішнє - (10) його зовнішньою рамкою. Поворот внутрішнього кільця на кут забезпечує магніту свободу рухів в одній площині (поворот навколо поперечної осі ракети), на кут - в іншій площині (поворот навколо другої поперечної осі). Крім того, магніт, будучи встановленим на двох шарикопідшипниках (5), напресованих на вісь, пов'язану з внутрішнім кільцем карданного підвісу, має можливість обертатися в третій площині (власне обертання гіроскопа). Разом із магнітом обертаються закріплені на спільній осі дзеркала (7) і (23) оптичної системи та модулювальний диск (21). Фотоопір (20) закріплений у внутрішньому кільці 6 карданного підвісу і може, отже, повертатися відносно корпусу ракети на кути.
Керувальні елементи гіроскопа розташовані на нерухомому каркасі. До них належать:
Чотири котушки (14), що створюють обертове магнітне поле, яке, взаємодіючи з постійним магнітом, викликає обертання гіроскопа. Двигун, утворений за такою схемою, є синхронним. Живлення на котушки подається з літака-носія. Після пуску ракети гіроскоп обертається за інерцією.
Чотири котушки (11) з підмагнічуванням, що слугують для запуску гіроскопа і стабілізації його обертання.
Дві циліндричні котушки (3) і (13), що відіграють роль електричного арретира. Призначення арретира полягає в тому, щоб утримувати вісь гіросистеми (отже, вісь голівки самонаведення) в положенні, що збігається з віссю ракети, до кінця ділянки "обнулення". У разі відхилення осі ротора гіроскопа від поздовжньої осі ракети в котушках (3) і (13) постійний магніт (9) індукує ЕРС, яка подається в підсилювач. Звідти напруга надходить на корекційну котушку (16), магнітне поле якої, взаємодіючи з полем постійного магніту, повертає ротор у початкове положення.
Чотири котушки (15) генераторів опорних напруг. Котушки розташовані зі зсувом на 90° одна відносно іншої, а протилежні з'єднані. Під час перетину витків обмоток силовими лініями магнітного поля постійного магніту в котушках наводяться ЕРС, зсунуті між собою за фазою на 90°. Ці ЕРС використовуються в координатному перетворювачі.
Корекційна котушка (16) циліндричної форми. Котушка під'єднана до виходу електронного підсилювача. Струм, що протікає по котушці, викликаний сигналом неузгодженості, створює магнітне поле, що змушує постійний магніт (9) (ротор гіроскопа) повертатися (прецесувати) навколо осей карданного підвісу (8) і (19). При цьому оптична вісь головки самонаведення повертається в бік цілі.
